

软硬件全栈自研率超高,魔法原子让人形机器人从“练兵场”走向通用




独家抢先看
作者 | 许丽思
编辑 | 漠影
2025年,人形机器人产业正迎来历史性转折点。据摩根士丹利报告,全球人形机器人百强企业中中国占据63%份额,产业生态加速形成,政策红利持续释放——深圳、北京等地明确2027年量产万台目标,行业市场规模预计2035年突破万亿。
技术革新成为破局关键,而大模型与具身智能的融合,正推动机器人从专用功能向场景化智能演进。
3月26日,魔法原子在场景战略发布会上推出行业首创的端到端“原子万象大模型”,独家创建快慢双模协同架构模拟人类认知模式,融合多模态感知、自主导航与运动控制,让人形机器人能够在垂类场景中进行自主规划、自主作业。
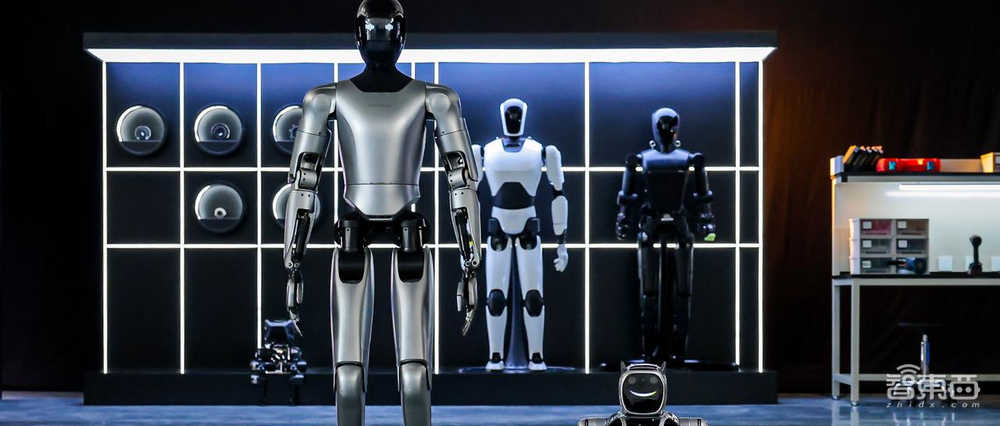
软硬件全栈自研,是魔法原子自成立以来就一直坚定践行的发展线路。目前,其已经实现了人形机器人小麦90%以上零部件自研,特别是灵巧手和关节模组这两大核心部件,有分析机构预测,其有望使得产品成本降低60%到70%。魔法原子也成为了少数同时自研人形机器人本体和灵巧手的企业。
技术革新的背后,是魔法原子由需求驱动创新、由场景定义价值的核心研发逻辑。这种对场景的深刻洞察,使其已将人形机器人小麦应用到工厂、商场、会展、新闻传媒等多个领域,后续还将拓展1000个合作伙伴,打造1000个人形机器人落地应用场景。今年,魔法原子预计将有400台人形机器人进入工业、商业场景。
一、实现本体90%以上硬件自研,独创快慢双模协同架构大模型
早些年,波士顿动力Atlas凭借液压驱动的空翻动作惊艳世界,显示出其在动态平衡、复杂地形行走上的巨大优势时,让不少人对人形机器人进入真实场景充满期待。
但后来由于高功耗、高噪音、高维护成本等问题,使其难以进入大规模商业化应用。曾经风光无限的波士顿动力,最后也难逃几经转手后被现代汽车收购的命运。
人形机器人的根本技术路线变革,出现在2020年前后。随着电机技术逐渐成熟,以及功率限制和关节动力输出等难点被攻克,电驱人形机器人迎来了全新的机会,国内的新一波人形机器人浪潮也蓄势待发了。
正是在这个时候,魔法原子开始了自己在机器人领域的研发布局:魔法原子CEO吴长征是中国最早一批参与到四足机器狗研发的人,团队还在全球首次实现了单批次千台量产;后来开始自研人形机器人,并且将关节模组峰值扭矩做到了超过了500Nm,出色的爆发力使其成功实现了全球首个电驱人形机器人空翻。
除此之外,魔法原子采用高强度轻量化材料设计机器人本体,从而降低机器人整体重量,并且不断优化能量管理系统,提升机器人的续航能力。
今年年初,魔法原子发布第一代自研灵巧手产品MagicHand S01,可实现抓、握、双指操作等复杂动作,并支持20公斤以上的负载能力。
数年来在本体研发上的沉淀,让魔法原子的人形机器人小麦的成长速度越来越快:不仅能够实现仿人行走、跑步,还可以在奔跑状态下适应马路、跑道、草地、山坡等多种环境,走路速度从0.3m/s逐渐提升,目前跑步速度可以达到2m/s。值得一提的是,小麦已经实现了90%以上零部件自研。
但要让人形机器人能够在跨场景中处理各种需求、具备泛化操作能力,还需要配备强大的大脑。
吴长征强调,大模型是人形机器人实现能力进化的“智能引擎”,大模型结合机器人,未来机器人的智能化能力存在百倍、千倍、万倍增长的机会。因此,魔法原子坚持研发原子万象大模型,目标就是要构建具备环境适应能力的人形机器人。
原子万象大模型,融合了多模态感知、自主导航、操作抓取、运动控制等功能模块,在端到端框架中实现人形机器人在空间智能、语言智能和行为智能的有机统一。该模型通过模拟人类认知模式,让人形机器人具备了多维思考路径、持续学习机制与类人行为范式,能够在垂类场景中进行自主规划、自主作业。

更特别的是,该模型独家构建了快慢双模协同架构,这种架构理念源自自动驾驶领域的应用验证。具体来说,基于动作专家模型的“快系统”结合了端到端模型和经典控制方案,能够响应环境变化,保障机器人各个部位动作的精准性;基于多模态大模型的“慢系统”负责理解复杂环节,并规划长期任务。
快慢系统的协同,让人形机器人具备深度场景理解能力,可以精准处理语言逻辑、视觉信息及动态环境参数,同步实时运动。魔法原子副总裁陈春玉进一步解释,之前采取明确的指令传递的形式,但人类穷举的指令是有限的,所以现在采取的是特征的向量形式,让模型在任务执行过程中,通过特征向量对小脑运动技能进行规划。这种特征向量虽不可直接表达,但通过训练系统形成了端到端的闭环架构,实现大小脑系统协同,支持复杂任务的动态规划。
二、打造软硬一体的系统性交付,核心部件成本有望降低60%到70%
对人形机器人来说,硬件决定了物理能力的边界,软件则定义了智能的上限。回看魔法原子数年来对硬件与软件全栈自研的坚持,背后是对技术创新和行业本质的深刻洞察。
在吴长征看来,人形机器人的终局,一定是“软硬一体的系统性交付”。不同于智能手机依赖外部软件应用生态来拓展功能、实现“通用”,人形机器人如果要成为全能的物理世界执行者,必须要有一套统一的系统,能使其在多种场景中完成环境感知、理解指令、动作执行。这种深度整合的系统,本身就包含了硬件控制与软件智能。
而从行业发展逻辑来看,软硬件融合也是必然趋势。如果一家公司只做硬件本体,另一家只做系统软件,那么两者在交互效率、功能协同上必然存在鸿沟——就像让不同厂商的大脑和身体配合,短期难以实现真正的无缝高效协作。
尤其是当人形机器人发展到后期,技术路线收敛,可能还会存在一些没有软件能力的本体公司,但这类公司对纯粹系统软件的需求,很难形成规模优势。
因此,企业要想让人形机器人实现通用性,自身必须同时掌控硬件设计与系统开发,软硬件深度耦合,才能让机器人的每一个关节、每一个传感器都能被系统高效调度。
在人形机器人价格居高不下的情况下,坚持全栈自研也是企业推动降本的必然举措。陈春玉提到,特别是灵巧手和关节模组,这两个核心部件据人形机器人接近一半的成本。有分析机构预测,魔法原子通过自研灵巧手和关节模组,有望使得产品成本降低60%到70%。
在智能手机行业中,苹果的成功源于其打造的硬件、系统与生态的闭环,但手机的“通用”是通过外部应用实现的。陈春玉认为,人形机器人行业未来也可能形成类似的“苹果+开发者生态”模式——一边是人形机器人公司打造软硬件一体的整机产品,一边是开发者基于通用本体开发垂类技能,使用者可按需选择。
三、深化场景应用,从工具替代走向人机共生
今年以来,多家人形机器人厂商凭借以极具视觉冲击力的表演、极致运动能力触发公众传播情绪,火爆全球。但也引发不少对人形机器人何时能够实现商业化的疑问,行业的分水岭逐渐到来:到底是追求突破物理极限的运动控制能力,还是在真实场景深耕、技术回归现实需求更为重要?
具身智能的发展是为了让机器人具备高度智能,能自主理解环境、规划任务并执行操作,在这个过程中,机器人的环境适应能力和灵巧操作能力可以说是是重中之重。
越来越厂商开始让人形机器人去到汽车车间、3C制造工厂、物流工厂等实训、应用,例如不久前Figure推出首个VLA模型Helix,并将其应用到Figure 02人形机器人上,让机器人进物流工厂分拣快递。可以看出,当前机器人技术的突破方向呈现出朝着操作能力倾斜的趋势。
吴长征提到,“人形机器人行业的竞争终将回归到‘能否真正创造价值’”。魔法原子一直坚持从场景出发推动创新、让技术回归真实需求,造出来的机器人必须是“有用、易用、有人用”。研发团队一方面通过深入理解工业、商业服务等高需求场景中的实际情况,另一方面不断增强自身供应链的全环节能力,从而推动人形机器人小麦在多个场景中的实践应用。
从去年11月开始,小麦进驻家电制造工厂,在零部件上下料、物料搬运、点胶、产品检测等岗位实训,多个人形机器人还可以实现有序协同作业。从最初的视觉识别、位姿估计和轨迹规划的经典技术路线,进化到快慢双系统的技术路线,小麦已经成长为工厂中的“熟练工”。经过三个月的训练,小麦在高速数字马达上下料工序中的成功率和效率实现了多倍提升,比如在参与点胶工作时,成功率提升了3倍,超过了85%,展现出强大的工业应用潜力。
谈及为什么选择家电制造领域切入,吴长征解释道,家电制造存在“品种多、产线柔性需求高”的特性,既有简单场景,又有复杂场景。人形机器人需要大规模、群体性工序场景做数据采集、训练学习与能力验证,有利于加快人形机器人的落地时间。
在追觅的家电制造工厂中,通过持续采集生产环境中的真实数据,魔法原子已经累计形成数百万条高价值训练样本,这些数据还原了真实物理交互,真正让人形机器人从“能理解”进化到“能行动”。
以家电行业为起点,在家电制造的多样性场景中训练,小麦未来有望能够无缝切换覆盖到各行各业,成为更通用的人形机器人。
而在商业场景中,小麦的身影也出现得越来越频繁,展现了出色的视觉识别、理解和人机交互能力。
在3月的全国两会期间,小麦以特邀记者的身份在演播室与网友进行互动,在街头对路人进行随机采访;在汽车门店,小麦担任机器人导购,主动识别进店用户需求,再通过自然语言向用户介绍车辆参数、功能配置及优惠政策;在多场展会活动上,小麦还负责了迎宾接待、讲解等工作;在美容美发场景里,小麦还会根据用户的发质情况选择吹风机的不同模式。

陈春玉谈道,在大量场景实践的过程中,发现人形机器人存在交互延时、操作技能级有限等问题,团队后续会着重在人机交互流畅性、技能级、决策能力等方面进行优化。另外,为进一步加快人形机器人场景应用步伐,发布会上,魔法原子还宣布将启动“千景共创计划”,将拓展1000个合作伙伴,打造1000个人形机器人落地应用场景。
今年,魔法原子预计量产400台人形机器人。在陈春玉看来,人形机器人迈向量产的路上,还存在两大挑战:一方面是技术工程化问题,从样机过渡到批量生产,需要解决一致性、稳定性和可靠性问题。尽管人形机器人领域缺乏成熟经验,但可借鉴工业机器人、协作机器人及汽车行业的质量管理体系。另一方面,是应用场景拓展,量产后需验证场景需求的真实规模,这依赖于行业整体的技术突破情况。
当人形机器人从人类手里结果越来越多的活,人类又该如何看待与它之间的关系?吴长征觉得,双方从来就不是人形机器人替代人类的关系,人形机器人本质是工具,它的存在是替代现有的工具,比如工业场景中一些柔性作业能力差的工业机器人,帮助人类完成任务。
之后,人形机器人的能力不断延伸,能够解决技工人才短缺的问题。下一个阶段,随着智能化与泛化能力提升,它们将成为人类社会中的新角色——“硅基生命”,人类社会会逐渐进入“双生时代”。到那个时候,人形机器人不只是进工厂,而是可以帮助人类探索未知世界,能够去到深海、太空等极端环境,帮助人类拓展生存边界。
四、结语:技术自研加速通用化的飞轮效应
对魔法原子来说,自研的硬件性能突破、垂直场景的数据积累、软硬一体的系统耦合,三者相互叠加,形成加速通用化的飞轮效应,进一步构建起生态壁垒,也让机器人有望渗透至更广泛的场景。
当行业逐渐迈向规模商业化与量产,这种长期主义的自研积累,会让技术优势如“滚雪球”效应一样放大,加快人形机器人的应用,而应用又会反过来反哺人形机器人,助力人形机器人真正从专用设备变成通用的“硅基生命”。
“特别声明:以上作品内容(包括在内的视频、图片或音频)为凤凰网旗下自媒体平台“大风号”用户上传并发布,本平台仅提供信息存储空间服务。
Notice: The content above (including the videos, pictures and audios if any) is uploaded and posted by the user of Dafeng Hao, which is a social media platform and merely provides information storage space services.”

