

开路不开城,被玩坏的智驾第一梯队



独家抢先看
作者|杨心怡
编辑|白雪
过去一年中,蔚来城区智驾仿佛「隐身」了。
在华为喊出「智驾全国都能开」,小鹏宣布在全国 243 个城市开放 XNGP、理想发布 AD MAX3.0,城市智驾开通 110 城时,却从未听说过蔚来喊出激进的开城口号。
蔚来并未失声,只是憋了个大招——不开城只开路,用群体智能来打城区智驾加时赛。
上个月李斌在蔚来智能驾驶发布会宣称蔚来是中国智能驾驶的第一梯队。

他解释,蔚来在用户规模、可用范围、道路验证三个层面已经进入中国车企第一梯队。
截至目前,蔚来已经拥有 228935 辆可使用城区智能驾驶车辆, 用户规模为国内最大。作为参考, 理想是 10.8 万、小鹏和问界各 6 万多名。
此外,蔚来城区智驾可用范围有 726 座城市、全国道路验证里程已经超过 120 万公里。
3 月时,蔚来还是蔚小理三家中唯一没有的全量对用户开放城市 NOA 的车企,仅一个月后,蔚来的城区智驾和销量双双起飞。
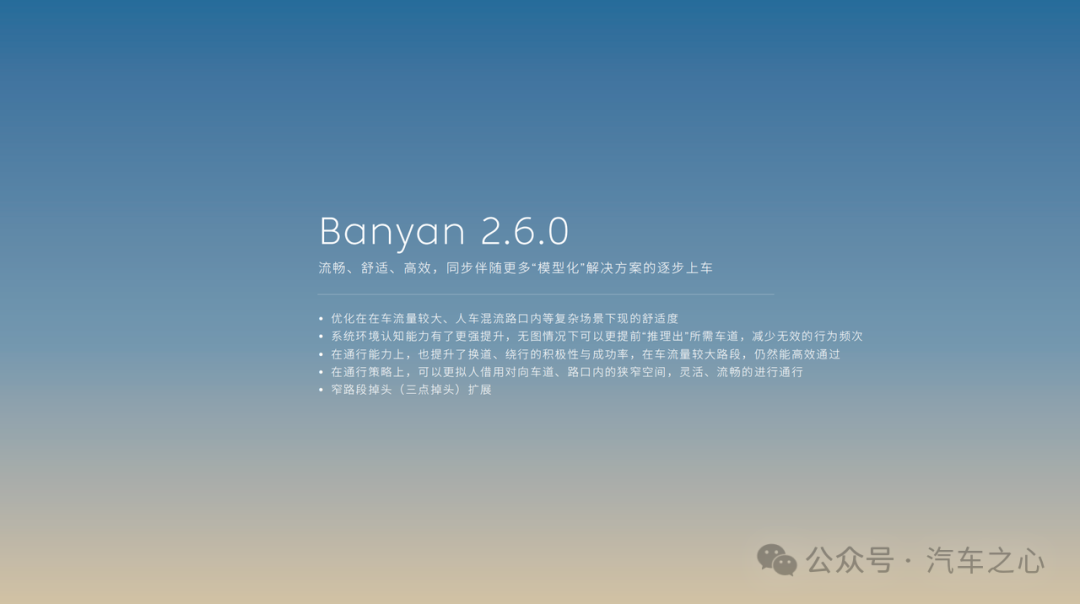
4 月 30 日,蔚来智驾系统升级为 Banyan·榕智能系统 2.6.0 版本,将全域领航辅助 NOP+城区功能向近 23 万名用户进行全量推送。
4 月成绩单也随之公布,蔚来销量突飞猛进,上个月蔚来交付新车 15,620 台,同比增长 134.6%,环比增长 31.6%。
在上个月的蔚来智能驾驶发布会现场,蔚来智能驾驶研发副总裁任少卿解释了蔚来实现城区智驾的公式:
「通用能力+按路验证/优化/开通/运营=全域领航辅助 NOP+」。

01
左手通用能力,
一次性搞定城区掉头?
蔚来在智驾公式中提到的通用能力是底层智驾能力,其中用到了两层技术:
「占用网络 OCC2.0」和「人车共驾安全模型 ADMS」。
占用网络 OCC 这个技术并不稀奇,来源于机器人学的技术理念,它包括将世界划分为网格单元,然后定义哪个单元被占用,哪个单元空闲。
至少早在蔚来之前,特斯拉早就将 OCC 技术应用于自动驾驶,在利用体积鸟瞰图、占用检测和体素分类三个方法解决之后,通过使用 3D 体素(voxel)来表示空间占用情况,能够处理复杂的空间关系,提高自动驾驶系统的泛化能力。

为了提升通用能力,蔚来开发了 OCC 2.0,官方表达为「超高精度纯视觉栅格」,可以利用车上 11 颗高清摄像头,在神经网络算法训练下,将 2D 画面转化成 3D 空间占据的表达。
在前、后、左、右各 10m 的范围内可达到 5*5*5cm³的空间精度,加强了系统对车辆周围环境的全面理解,相较于只能处理简单场景的 OCC 1.0,智能驾驶的「感知精度」与「泛化能力」大幅提升。
此外在通用能力提升安全性的层面,蔚来发布了人车共驾安全模型 ADMS。
区别于传统驾驶员监控系统主要监测驾驶员生理和行为状态,ADMS 采用多模态监测、实时数据分析和深度学习算法等对驾驶场景和驾驶员状态进行动态分析,达到精确的安全预警。
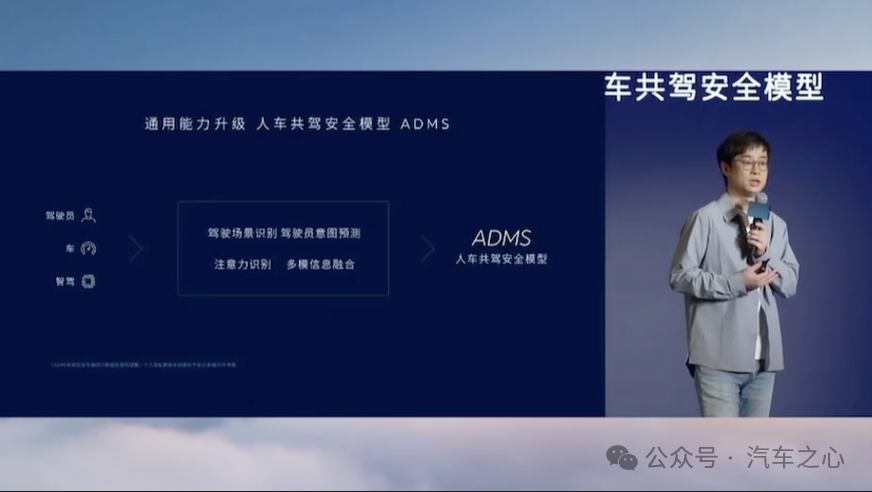
其中包括了多模态监测、实时数据分析、深度学习算法、个性化安全预警。听起来很复杂,但无非就是监测预警的方式更多元、个性化了。
比如,过去车企多是通过调用摄像头来监督驾驶员,但在社交媒体上依然能看到少部分用户用水瓶绑住方向盘维持重力感应,试图脱手挑战智驾,ADMS 除了调用摄像头,还增加了面部识别、眼球追踪、身体姿态监测等,来综合评估驾驶员的状态,避免危险驾驶。
ADMS 相比传统 DMS,风险场景的有效提醒率提高了 3.5 倍。
以上均为隐性安全,但在占用网络和安全模型的基础上,蔚来的 Banyan・榕 2.6.0 版本更新了两个显性安全功能,无车道线通行与三点掉头,用户能够直接感知到智能好用度在提升。
拿无车道线通行来说,蔚来通过底层模型融合导航地图、潜在车道线、OCC(占用网络)和可行驶边界,构建出即使在没有明确车道线标识的情况下也能安全行驶的路径。

比如在暴雨中,传统自动驾驶的感知系统目标识别的置信度降低,蔚来采用了多传感器融合的 Aquila 超感系统来提高感知鲁棒性,33 个高性能感知硬件在目前新势力车型上算是顶配了,这个风格确实很蔚来。
另外一个功能是三点掉头。

一次性完成在狭窄城市道路掉头,并不简单。三点掉头只需要对车辆进行三次移动,向前行驶、倒车、再向前完成掉头。
目前新势力和特斯拉确实没有针对一次性掉头的智驾功能,蔚来结合城市出行痛点,推出了支持三点掉头场景的全域领航辅助,并加上了「全球首个」的定语,可以说是非常巧妙。
02
右手群体智能,开路比开城更好?
小鹏汽车 CEO 何小鹏曾公开透露过开城的底层逻辑,「发现问题——系统考试——系统测试。」
在第一轮中采集员把遇到的路况问题用语言描述出来传输至生产管理系统,然后由系统工程师和算法人员来分析、处理问题特征。
第二轮则是系统对安全接管、流通性、舒适性等关键指标打分,测试车若满足通行标准,路线就能被释放。
第三轮就是对重点问题和风险点的再度测试,保证上车稳定。
蔚来跟小鹏的这套开城逻辑不同,蔚来是「开路不开城」,按照按路验证/优化/开通/运营的逻辑来开路。
简单来说,就是蔚来要先对每一条道路进行详尽的验证,以确保智能驾驶的高安全性与高可用性,紧接着在验证过程中发现的问题,蔚来会进行针对性地学习以解决,并对每一条道路进行优化。
优化后的道路会重新开通,并进行持续的运营。到了开通阶段,蔚来就通过用户领航心愿单的「热力」为参考,按路线开通、路线共享、汇线成网的方式,逐步为用户开通心愿路线,提供全域增强领航辅助驾驶服务。
用户心愿路线开通后,就能在道路上使用城区 NOP+,并共享其他用户已开通的心愿路线。最终蔚来通过 NAD 群体智能系统来进行验证和运营,确保路线的持续可用性和连续性。
验证、优化、开通、运营的开路四步离不开群体智能。
这相当于蔚来靠二十多万辆搭载超感系统的量产车,组建起了一个开路军团。
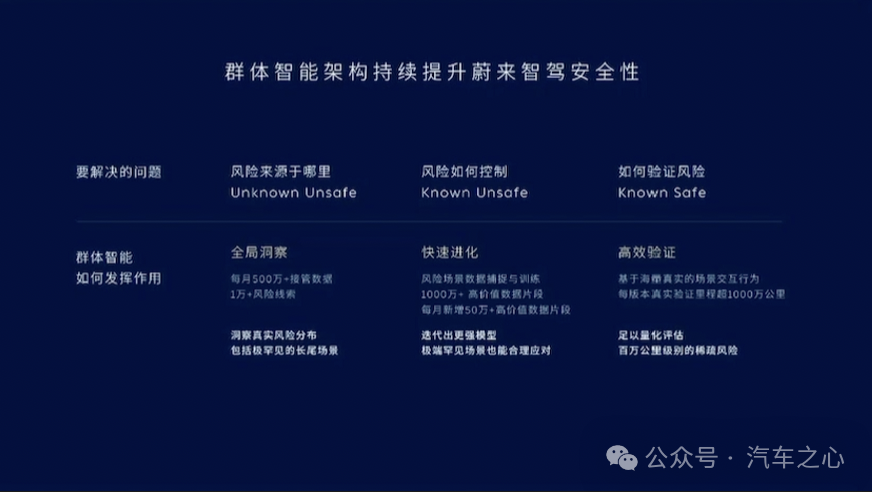
据悉,蔚来的群体智能系统通过收集和分析高价值的驾驶数据片段,把不安全场景通过训练和测试来解决,并继续通过车队来检验安全性。
每个智驾版本更新后,蔚来都会进行至少 10,000 公里的安全实测,验证系统安全性。
任少卿介绍,蔚来的群体智能道路验证,可以分三步:
通过群体智能收集数据,加强无车道通行和 OCC 能力,采集超过 10 万小时的高质量数据以增强通用能力;
进行场景验证,通过百万公里以上的验证片段,确保通用能力在各种场景下均适用;
基于大量用户车辆进行实车道路验证,每月验证里程超过 2000 万公里,每条路经过 5 次验证及云端校验后,才会向用户推送更新。
03
当智驾组局者的野心,
快溢出来了
相比于随大流,蔚来进入智驾第一梯队的姿态有不同之处,分别表现在开城方式不同、定义方式不同、全域智驾的能力不同。
先来看开城,在车企们一直竞争的智驾开城中,与华为、小鹏等车企的「开城」模式形成鲜明对比,蔚来汽车采取了「开路」模式。
这种策略的核心在于,蔚来不是在城市内随机部署智能驾驶功能,而是专注于对特定路段进行深度优化和精确覆盖,确保其智能驾驶系统在多变的道路条件下也能提供稳定可靠的服务。
借助这种方式,蔚来对车端数据收集能力达到最大化。
其次,能看得出来蔚来在智驾进化的过程中不止想成为竞争者,更想成为组局者。在发布会上,任少卿提到了两个有意思的指标,智驾可用指数和智驾安全指数。
不得不说,蔚来是懂「造词」的。
传统的智驾评估指标往往侧重于技术的某一方面,如接管率或特定场景下的性能。
接管率越低,意味着用户需要接管车辆控制权的频率越低,表明自动驾驶系统的独立运行能力越强;特定场景就很多了,包括泊车场景成功率、对交通信号灯识别能力等等。
相比于继续沿用不太全面的智驾词汇,蔚来造了两个新词:可用指数和安全指数。
智驾可用指数:智能驾驶使用时间/行驶时间
智驾安全指数:人驾事故率/智能驾驶事故率

可用指数和安全指数分别衡量智能驾驶系统的可用性和安全性,丰富了智能驾驶评估的维度。
蔚来对智能驾驶的终极想象是从起点到终点的全域领航,「把高速、城区、停车场和换电站这些所有的场景连起来,最终实现点到点的全域的领航体验」。

实现端到端的无缝智能驾驶体验之于蔚来似乎已不是很遥远。在发布会上,蔚来首次公开了端云算力规模,如无意外这可能是全国最高的端云算力规模,蔚来 23 万台车的端云算力总规模达 230.29 EOPS。
如蔚来发布会所承诺的那样,4 月 30 日伴随 Banyan·榕智能系统 2.6.0 版本升级,城区 NOP+向近 23 万名用户进行全量推送。
如果没猜错的话,蔚来选择这一时间点,主要是为了方便车主在五一小长假之前就用上智驾出行,而这次推送也是目前国内最大规模的城区智能驾驶推送。
蔚来的优势不仅是智能驾驶方法论以及技术差别。
它的特殊之处在于全链路式打通了「类无人」的驾驶方式,甚至连进入换电站也可以借助自动泊车辅助功能完成。
从最近蔚来换电联盟扩张、全量推送 NOP+的大动作来看,蔚来更想当主导者、组局者。
这也就像李斌曾经说的「蔚来品牌向上,但也别忘了蔚来也接地气」,据任少卿介绍,到2024年第二季度,蔚来开通里程将再增加40000公里。无疑,接地气的蔚来已经在蓄力中。
“特别声明:以上作品内容(包括在内的视频、图片或音频)为凤凰网旗下自媒体平台“大风号”用户上传并发布,本平台仅提供信息存储空间服务。
Notice: The content above (including the videos, pictures and audios if any) is uploaded and posted by the user of Dafeng Hao, which is a social media platform and merely provides information storage space services.”

