

科幻里的机器人蜂群被浙大搞出来了!可编队飞行追踪目标




独家抢先看
原标题:科幻里的机器人蜂群被浙大搞出来了!独立思考自主导航,可编队飞行追踪目标,成果登Science子刊封面
机器人集群自如穿梭密集的竹林,这一幕不是出自电影大片,而是在浙江湖州真实上演。
自然形成的复杂环境对机器人来说是未知的,没有事先测绘。
也没有统一的中央指挥,每一只机器人都在“独立思考”,全靠算法临场反应。
这项来自浙江大学的研究成果登上最新一期Science Robotics封面。
据浙江大学介绍,此前的机器人集群表演大多通过卫星定位和轨迹编码实现,由地面计算机统一控制。
这种模式下,机器人群体一旦失去指挥就会“群龙无首”,不但无法保持队形还可能撞上障碍物或相互碰撞。
这次的新成果被Science Robtics评价为第一个能在非结构化环境中分散、自主飞行的集群系统。
可以在避障之后迅速恢复队形。
也可以相互配合持续追踪特定目标。
那么浙大团队是怎么做的呢?
*(完整演示视频在文末)*
鸟群模式
论文中介绍,飞行机器人的研究受动物启发,分为虫群模式和鸟群模式两种。
昆虫会做短程的反应性动作(比如苍蝇避开苍蝇拍)。
基于反应的虫群导航算法对算力和内存的需求更小,机器人可以做得更小。
鸟类有更敏锐的感官和更大的脑容量,可以做长期的轨迹规划。
基于轨迹规划的鸟群导航算法有更强的性能和可扩展性,因此浙大团队选择了这一种。
在群体轨迹规划算法上,如果只考虑空间因素会影响机器人集群间的配合。比如通过狭窄空间时会拥堵,导致后面的机器人必须绕路。
因此,浙大团队同时对时间和空间做轨迹规划,利用稀疏参数优化(sparse parametric optimization)和约束转录(constraint transcription)方法提升速度,做到实时计算。
在穿越高密度竹林时,这种算法可以让多个机器人先后通过狭窄缝隙避免碰撞,无惧倾斜竹子和高低起伏的地形。

除了轨迹规划外,浙大团队改进了视觉-惯性里程计 (Visual-Inertial Odometry)做群体的定位。
为了避免长距离积累的微小误差最终造成相互碰撞,开发了分布式漂移校正算法。
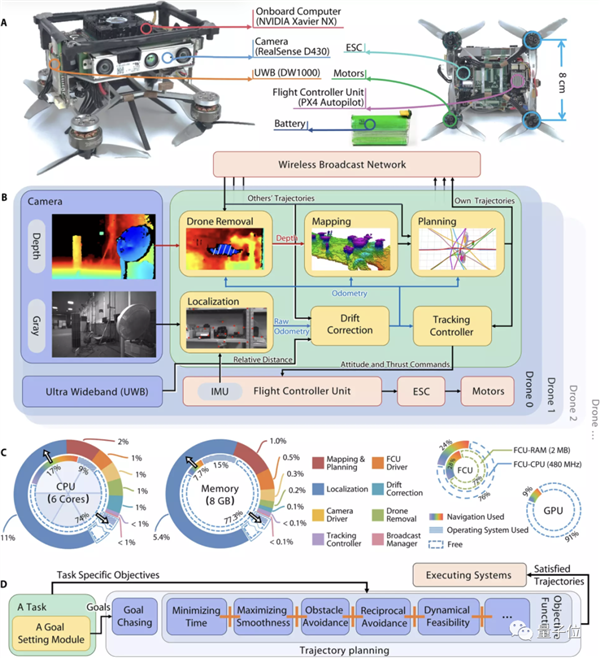
每个机器人都有完整的感知、定位、规划和控制功能,相互之间用高保真无线通信来共享轨迹。
在10个机器人密集飞行实验中,研究人员关闭了GPS信号、临时增加障碍物、以及人类主动干扰都没出现碰撞。

实验所用的机器人由浙江大学控制科学与工程学院和湖州实验室研发。
单个机器人只有手掌大小,比一听可乐的重量还要轻。

搭载了英伟达Xavier NX模组,拥有6核CPU和384核GPU及8GB内存。
但在实验中,除了个别例外场景,CPU和GPU的使用率都保持在40%以下,在有限的计算资源实现了复杂行为。
将用于救灾、勘探和运输
论文第一作者为浙江大学控制科学与工程学院博士研究生周鑫,通讯作者为该院高飞博士和许超教授。
团队成员来自科学与工程学院及湖州研究院。

这次成果解决了在混乱的野外环境中机器人集群自主导航的问题,提高了对各种现实任务的适应性。
地震、洪水和火灾中,机器人集群可用于搜索、引导受困者,或运送紧急物资。
在生态研究、地质勘探中,使用机器人集群可以调查狭窄的环境。
而开发出的自主导航算法,也可以用于火星车、月球车,以及多台货运无人机协作运输重量超过单台运输能力的货物。
“特别声明:以上作品内容(包括在内的视频、图片或音频)为凤凰网旗下自媒体平台“大风号”用户上传并发布,本平台仅提供信息存储空间服务。
Notice: The content above (including the videos, pictures and audios if any) is uploaded and posted by the user of Dafeng Hao, which is a social media platform and merely provides information storage space services.”

