

ESA宇航员从国际空间站远程控制人形机器人




独家抢先看
原标题:ESA宇航员从国际空间站远程控制人形机器人
据外媒New Atlas报道,由于采用了新的机器人系统,国际空间站(ISS)上的宇航员现在可以从国际空间站远程控制地球上的人形机器人。欧洲中部夏令时间周五上午11点30分左右,ESA宇航员Alexander Gerst 对在德国航空航天中心(DLR)的人形机器人Rollin'Justin进行远程指挥。
这是对最新技术进行的两小时测试,这将使未来的远征队队员能够探索其他行星。

据欧洲航天局(ESA)称,周五的测试是多个航天机构合作的多用途端到端机器人操作网络(METERON)项目中的最新一项,该项目旨在充分利用载人和机器人任务。行星任务中输送机器人的成本要低得多,在行星和卫星表面着陆和操作它们的成本要比输送宇航员便宜几个数量级。

问题是,即使是最先进的机器人也存在很多限制,并且行星任务距离太远以至于无线电信号可能需要几分钟或几小时才能到达机器人,所以从地球遥控是不切实际的。出于这个原因,METERON和类似的项目旨在通过创建宇航员留在轨道上的系统来分裂差异,但他们可以远程控制地面上的机器人。
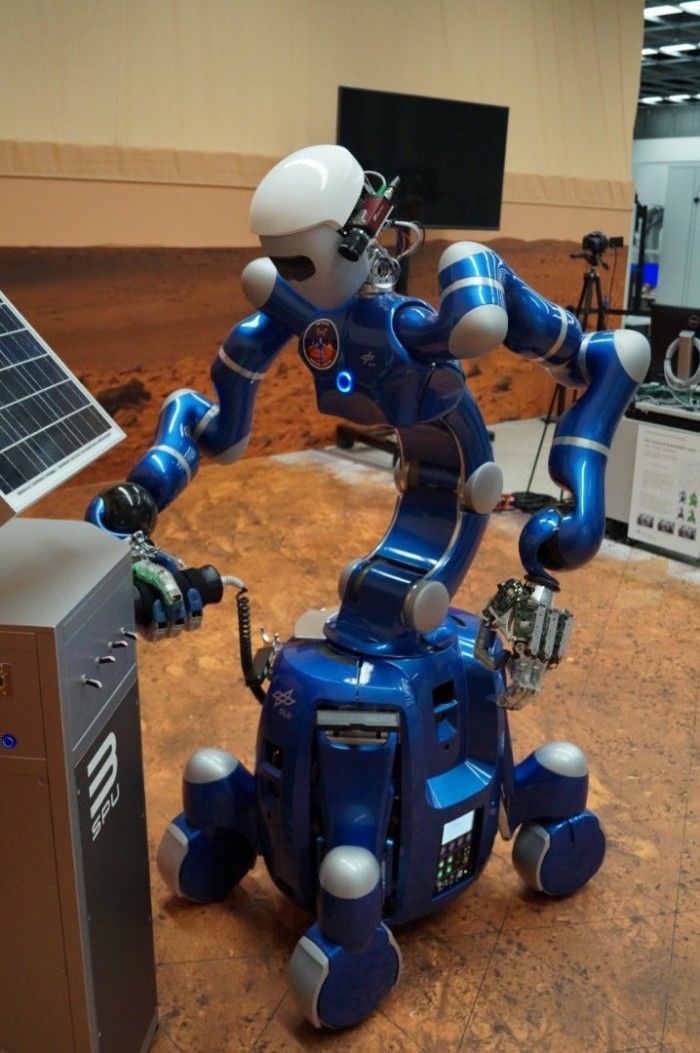
在周五的测试中,国际空间站的Gerst使用平板电脑控制Rollin'Justin,让宇航员从机器人的角度看,因为它在模拟火星景观中的一组太阳能电池板上工作。“我们依靠机器人的智能来执行国际空间站工作人员指挥的小型任务包,而不是指挥机器人的每个关节和每一个运动,这需要人类的高精神负担,”DLR的首席调查员Neal Lii说道。“我们正在通过这些SUPVIS Justin实验是将机器人展示为真正的同事,宇航员提供机器人可以在本地计算然后执行的抽象命令。我们的模型是受监督的自动运行,宇航员能够管理一队机器人到实现既定目标。”
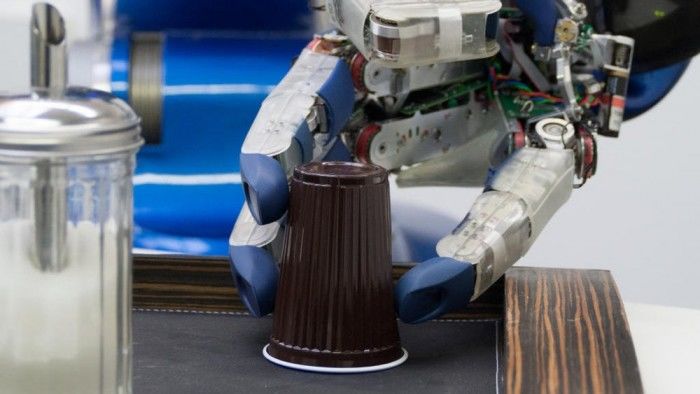
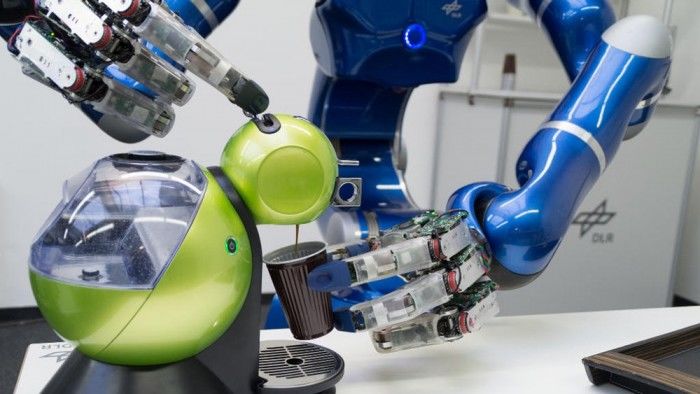
“我们希望看到如何使交互尽可能简单直观,同时通过每个连续的ISS-地面实验来增加任务的复杂性。从更简单的切换开关任务开始,我们已经进步到资产检索,安装,以及灵巧修理。这些代表了迄今为止从太空指挥的一些最灵巧的远程机器人任务。”
Rollin'Justin是DLR 开发 的一个人形机器人研发平台。Rollin'Justin于2008年推出,高达75.2英寸(1.91米),重约440磅(200公斤)。手臂、躯干和移动平台具有51个自由度,当其以高达4.4英里/小时(7.2公里/小时)的速度前行时,其内部电池可以运行超过一个小时。此外,它的所有“关节”中都配备扭矩传感器、两个平衡传感器、两台立体摄像机、四台彩色摄像机,旨在与人类合作完成任务。

“特别声明:以上作品内容(包括在内的视频、图片或音频)为凤凰网旗下自媒体平台“大风号”用户上传并发布,本平台仅提供信息存储空间服务。
Notice: The content above (including the videos, pictures and audios if any) is uploaded and posted by the user of Dafeng Hao, which is a social media platform and merely provides information storage space services.”

