

怎样判断自己身在何方?扫地机器人和智能驾驶的千丝万缕




独家抢先看
原标题:怎样判断自己身在何方?扫地机器人和智能驾驶的千丝万缕
【PConline杂谈】最近几年,“智能驾驶”被炒得沸沸扬扬,由特斯拉和谷歌领衔,而后众多互联网科技企业纷纷投身其中,一时间风起云涌。而同样作为人工智能下的一部分,市面上的扫地机器人也常常被诟病打扫不力,出现“乱跑乱撞”、“强怼墙角”等问题。此前,美国的Neato公司和国内的360都宣称旗下的扫地机器人产品搭载了自动驾驶技术,那么,它是怎么将自动驾驶的眼睛嫁接到扫地机器人身上的呢?扫地机器人真的能分辨出自己身在何方了吗?

扫地机器人是如何定位的?
作为清洁领域的“无人机”,智能扫地机器人悄然进入我们的视线中,替代双手完成地面清扫工作,对于讨厌做家务的上班族来讲,简直是一大福音。用过扫地机器人的朋友一定会遇到这样的情况,扫地机乱跑乱窜,有的地方扫了好几次,有的地方却从来不扫,实在没有“智能”可言。

其实,判断一款扫地机器人到底是“智能”还是“智障”,还得取决于它的定位方式。最初的第一代扫地机器人只能靠乱跑乱撞来改变路线,清理效果不尽人意,因而又出现了第二代扫地机器人,也就是现在我们买到的扫地机器人,最常见的定位方式有以下三种:

基于信标定位:信标定位原指在航海或者航空中利用无线电基站发出无线电波实现定位与导航的技术,放在扫地机器人上则是利用三点式定位,测量机器人与周边环境距离的变化来判断机器人与信物的相对位置,这样的定位方式得到的坐标精准度较高、稳定性好,但安装信标的花费很高,市面上应用这项技术的机器人少之又少,大部分用在高端产品当中。
地图模拟定位:通过自身的各种传感器探测周围环境,利用反馈的数据构造出一个模拟地图,并与事先储存的完整地图进行匹配,最后得到一个在全局环境中的坐标,从而确定自身的位置,这种方式比较适合结构简单的环境,如果遇到复杂的环境则工作的时间更长,也更加费电。
天花板图像定位:扫地机器人朝上的一面配备一个能够拍摄天花板图像的高清摄像头,通过拍摄天花板图像来匹配位置,定位自身在环境中的坐标,这种定位系统对于天花板的几何图形要求比较高,几何信息模糊的天花板会大大影响定位精度。

这三种定位方式各有优劣,信标定位准确,但是费钱,且不说信标物贵,前期安装也是费事费力。天花板定位对参照物要求高,定位准不准全靠运气。只有地图模拟定位相对靠谱,造价又低,是一种两全之计。无论它们的定位方式如何不同,目的都是一致的:尽可能避开障碍,覆盖尽可能多的清扫面积。因为复杂的家居环境,扫地机器人遭遇的危险和障碍,和无人驾驶的工作方式高度重合:在复杂多变的环境中规划出一条高效安全的路线。
扫地机器人植入智能驾驶的眼睛
经历了两代扫地机器人的进化,价格昂贵、伪智能等致命缺点迫使市场不得不推出新一代的产品。事实上,这几年很多科技巨头企业都在不断探索中,在价格与智能的跷跷板上寻找一个最佳的平衡点。
面对这样的问题,把汽车的无人驾驶技术下沉到扫地机器人上能否解决?扫地机器人面对的障碍和危险,在某种程度来说并不亚于无人驾驶车辆,而它们的目的相似,如果把激光雷达传感器放置到扫地机器人上用,逻辑上似乎也没什么不妥。

事实上Neato就是这样做的,将谷歌的自动驾驶汽车算法SLAM和激光雷达传感器结合到一起,自动驾驶汽车将激光雷达放置在车顶上,扫地机也同样的在顶部凸起部分集成了激光雷达和雷达接收器。当扫地机器人启动时,凸起的激光扫描系统便开始工作,以每秒五圈的速度,向周围的环境发射激光激光,实时扫描周围环境,并在机器内部系统形成一个3D地图,这种扫描系统与谷歌的无人驾驶技术原理上是完全一样的。

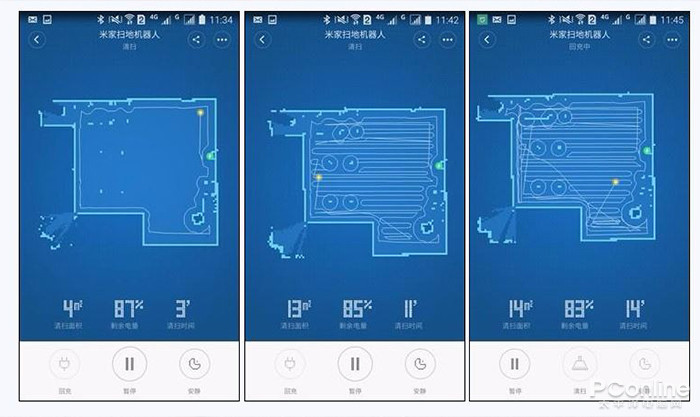
Neato生成地图后,可设置清扫一遍或两遍。如果设置为清扫两遍,扫地机则会在地图的边界清扫,然后来回清扫第一遍,清扫第二遍时,它会改变不同的方向,重复该过程,整个清扫路线形成网状结构。

基于这样精准的传感器和高效率的算法 ,Neato很快就可以完成扫地流程,并且不会重复扫同一块区域,还能避免碰撞家居,比普通的扫地机器人更快、更全面地完成了房间的打扫。
为了验证应用了无人驾驶技术的扫地机器人是否可以辨认自己身在何方,我们做了几个测试。

一、我们把Neato扫地机器人放置在客厅工作,等待它清扫一段时间后,将它搬离至同一个房间的不同位置,继续开启清扫。扫地机继续开始清扫,且避开了此前清扫过的位置,看来机器已完成了地图构建。

二、把Neato扫地机器人放置在客厅工作,等待它清扫一段时间后,将它搬离至不同房间,继续开启清扫。扫地机迟疑一会后重新开始工作,面对陌生环境,它也选择了重新去探测和构建地图。

三、把Neato扫地机器人放置在客厅工作,等待它清扫一段时间后,将它搬离至不同房间,继续开启清扫,然后再将其移动到最初的客厅位置开始工作。扫地机器人像是从来没有清扫过这片区域一样,重新开始了探测工作。Neato的地图记忆可能只能保存一份,当面对陌生环境时,它将会覆盖原先扫描过的地图,重新构建保存当前环境的地图。
扫地机器人是迷你版无人汽车
从以上的测试可以看出来,运用了智能驾驶后扫地机器人在扫地上有更快速有效的算法和方案,虽然看起来智能驾驶汽车和扫地机器人无论是级别还是功能上都有着天壤之别,但他们确实存在很多共性。

从工作原理上来讲,他们都是正确识别当前的工作环境,并且制定出一条路线。同样是激光雷达,通过传感器收集数据,传输到处理器上,根据地形信息制定出合理的方案。但扫地机器人上的激光雷达并没有汽车上的那么大,汽车上的雷达测量距离可以长达数百米,而放到扫地机器人上,10米左右的测量距离完全可以满足大部分家庭环境。

在软件层面上,扫地机器人几乎把汽车上的SLAM技术完全搬了过来,精准的地图感知让扫地机器人即使在狭小的空间也可以准确判断。再加上算法的不断升级优化,面对突发问题上能够有更好的处理方式,更加适合扫地机器人的应用场景。


之前测试过的激光扫地机路线
不难看出,扫地机器人与智能驾驶汽车有着千丝万缕的关系,称它为行走在家庭中的无人汽车也不为过。在互联网的时代,一切想法都将变成可能,通过不断提升研发能力,与高端的产品特性相结合,像这样出色的“嫁接”产品就会诞生。
自动驾驶技术仍然不成熟,扫地机器人的硬伤仍在
被誉为第三代扫地机器人的智能驾驶扫地机,在无人驾驶以及一系列传感器技术的加入后,清扫覆盖率得到了长足的提升,但是越线和边角清扫两大难题仍然困扰着各大扫地机器人厂商,而硬怼墙角凳角、无法分辨软障碍等问题也同样存在。

而同样火爆的智能驾驶,也存在着自己的局限。虽然这几年大肆发展智能驾驶,无论媒体和厂商宣传得有多牛,但不得不承认自动驾驶目还处于不成熟的阶段,在智能驾驶行业内有两套不同的标准,不约而同地分为了5个等级,从L1到L5,目前量产汽车自动驾驶技术都只停留在L2~L3级别,也就是说驾驶过程中需要更多的人为操作,想要达到L4或者真正全自动驾驶的L5还需要非常漫长的时间。

以马斯克的特斯拉为例子,近些年有关其旗下的自动驾驶技术的负面新闻就不胜枚举,交通事故频发也导致很多人对这项技术持怀疑态度,同样的问题放到扫地机器人上,消费者希望从繁琐的家庭日常清洁事物中解脱出来,让扫地机器人代替人类完成扫地工作,如果扫地机器人不能胜任这样的工作,最终家务还是得落到消费者手中。

将自动无人驾驶技术与扫地机器人结合确实是这个时代的大势所趋,但想要确保这项技术在扫地机器人上稳定发展且受到消费者的认可,首要的任务是必须解决技术上的缺陷和不足,然后才能将相关的产品推广到市场,否则仍然是“伪智能”的扫地机器人。
“特别声明:以上作品内容(包括在内的视频、图片或音频)为凤凰网旗下自媒体平台“大风号”用户上传并发布,本平台仅提供信息存储空间服务。
Notice: The content above (including the videos, pictures and audios if any) is uploaded and posted by the user of Dafeng Hao, which is a social media platform and merely provides information storage space services.”

